EtherCAT

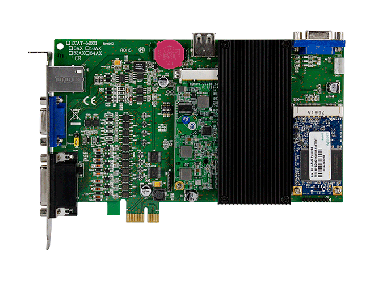 ICPDAS ECAT-M801 series - EtherCAT Master PCIe card
ICPDAS ECAT-M801 series - EtherCAT Master PCIe card● Up to 8/16/32-axis motion control
● Up to 64 slaves
● Slave operation (SDO, PDO)
● Axis homing
● Single-axis position and velocity control
● Synchronized motion (E-GEAR, E-CAM)
● Virtual axes
● Multi-group motion control
● Multi-axis linear interpolation
● 2D/3D circular interpolation
● Helical interpolation
● On board 13 DI and 13 DO
● On board 2 encoder interfaces with compare trigger output
● API for CiA402 servo drives and ICP DAS stepper motor control modules
● API for ICP DAS DI/DO and AI/AO modules
● Hardware emergency stop
● Supports software second-order filters with low-pass filters, high-pass filters, and notch filters.
● Slave to Slave communication is supported (topology independent) ICPDAS 1-to-3 Port EtherCAT Junction Slave Module - ECAT-2513
ICPDAS 1-to-3 Port EtherCAT Junction Slave Module - ECAT-2513● Powerful MCU handles efficient network traffic
● Distance between Stations up to 100 m (100BASE-TX)
● Support daisy chain and star connection
● EtherCAT conformance test tool verified
● ESD Protection 4 KV Contact for each port ICPDAS 1-to-5 Port EtherCAT Junction Slave Module - ECAT-2515
ICPDAS 1-to-5 Port EtherCAT Junction Slave Module - ECAT-2515● Powerful MCU handles efficient network traffic
● Distance between Stations up to 100 m (100BASE-TX)
● Support daisy chain and star connection
● EtherCAT conformance test tool verified
● ESD Protection 4 KV Contact for each port EtherCAT to single-mode fiber optic converter kit - ECAT-2511-A/B KIT
EtherCAT to single-mode fiber optic converter kit - ECAT-2511-A/B KIT● ECAT-2511-A and ECAT-2511-B (kit)
● EtherCAT Single-Strand Media Converter
● Powerful MCU handles efficient network traffic
● Distance between Stations up to 25 km (100BASE-FX)
● 50% Cost Saving for Fiber Optic Infrastructures
● EtherCAT conformance test tool verified
● ESD Protection 4 KV Contact for each port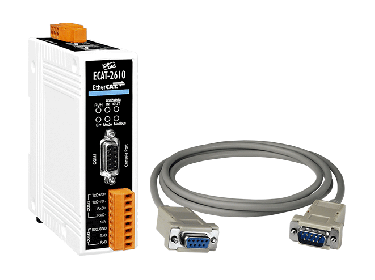 EtherCAT Slave to Modbus RTU Master Gateway
EtherCAT Slave to Modbus RTU Master Gateway● Powerful MCU handles efficient network traffic
● 2 x RJ-45 EtherCAT connectors
● Integrate RS-232/422/485 serial device to EtherCAT
● Retro-fit older automation devices into modern EtherCAT communication structures
● Requires no hardware or software changes to be made to the connected device
● Compatible with all PLCs with EtherCAT support
● Performs complete serial protocol conversion, no PLC function blocks required
● Supports maximum 256 WORD Input and 256 WORD Output Data
● Supports serial port interface
‣ Supports Modbus RTU (Master) protocol
‣ Supports RS-232/422/485 Port
‣ Supports maximum Baud Rate 115200 bps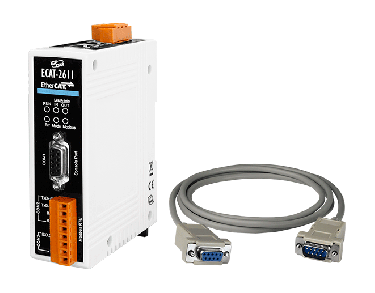 EtherCAT Slave to Modbus RTU Slave Gateway
EtherCAT Slave to Modbus RTU Slave Gateway● Powerful MCU handles efficient network traffic
● 2 x RJ-45 EtherCAT connectors
● Transfer of I/O data between two networks
● Retro-fit older automation devices into modern EtherCAT communication structures
● Requires no hardware or software changes to be made to the connected device
● Compatible with all PLCs with EtherCAT support
● Performs complete serial protocol conversion, no PLC function blocks required
● Supports maximum 256 WORD Input and 256 WORD Output Data
● Supports serial port interface
‣ Supports Modbus RTU (Salve) protocol
‣ Supports RS-232/422/485 Port
‣ Supports maximum Baud Rate 115200 bps
‣ Supports Modbus Function code 03, 04, 06 and 16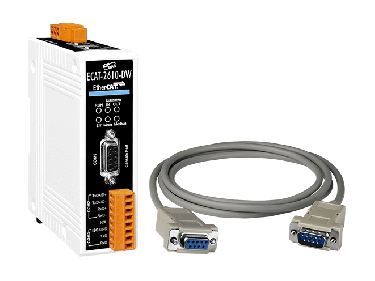 EtherCAT to Modbus RTU and Power Meter Gateway
EtherCAT to Modbus RTU and Power Meter Gateway● Supports maximum 128 Input and Output Data
● Supports maximum 6 connection for PM-3033/3133
● 2 x RJ-45 bus interface, Integrate RS-232/422/485 serial device to EtherCAT
● Allows system integrators to retro-fit older automation devices into modern
● EtherCAT communication structures
● Supports blended to other Modbus slave
● Supports maximum Baud Rate 115200 bps EtherCAT single axis stepper motor controller/driver
EtherCAT single axis stepper motor controller/driver● 1 x Stepper motor (2-phase bipolar stepper motor)
● Drive capability up to 1.5 A/phase coil current (with proper cooling and airflow up to 2.0 A/phase)
● Voltage range of the motor: 6 to 46 VDC
● 1 x 5V power supply for encoder. Limitation: the output current should not exceed 150 mA
● 1 x Encoder interfaces (A, B, Z), differential
● 2 x Digital input: Reference switch input, latch input
● 1 x Digital output
● Highest resolution: 256 microsteps per full step
● Automatic current reduction to reduce heat when motor is not moving
● Over-temperature protection
● Optically isolated I/O
● LED indicators for I/O, EtherCAT and motion status
● EtherCAT:
‣ 2 x RJ-45 bus interface
‣ Distance between stations up to 100 m (100BASE-TX)
‣ Support daisy chain connection
‣ EtherCAT conformance test tool verified
‣ Supports Free-Run, SM synchron and Distributed Clock (DC) operation modes
● Removable terminal block connector EtherCAT slave 4-axis stepper motor controller/driver - ECAT-2094S
EtherCAT slave 4-axis stepper motor controller/driver - ECAT-2094S● Supports four stepper motors (2-phase bipolar)
● Stepper motors are controlled in an open loop operation
● Programmable coil current level: up to 1.5 A/phase
● Programmable microstep size: maximum 256 microsteps per full step
● Supported motor voltage range: 6 to 46VDC
● 4 x Encoder interfaces (A, B, Z), differential
● 8 x Digital input. Two DI channels for each axis: reference switch input, latch input
● 2 x Digital output
● Automatic current reduction to reduce heat generation when motor is at standstill
● Drive protection:
‣ Over-temperature
‣ Under voltage
‣ Short circuit
● Optically isolated I/O
● LED indicators for I/O, EtherCAT and motion status
● Internal memory for storing configuration data
● EtherCAT:
‣ 2 x RJ-45 bus interface
‣ Distance between stations up to 100 m (100BASE-TX)
‣ Support daisy chain connection
‣ EtherCAT conformance test tool verified
‣ Supports Free-Run, SM-Synchron and Distributed Clock (DC) operation modes
● Removable terminal block connector EtherCAT slave CiA402 Standard 4-axis stepper motor controller/driver - ECAT-2094DS
EtherCAT slave CiA402 Standard 4-axis stepper motor controller/driver - ECAT-2094DSECAT-2094DS 4-Axis Stepper Motor Controller/Driver
●Support CiA402 protocol
●Supports four stepper motors (2-phase bipolar)
●Stepper motors are controlled in an open loop operation
●Programmable coil current level: up to 3.3 A/phase
●Programmable microstep size: maximum 256 microsteps per full step
●Automatic current reduction to reduce heat generation when motor is at standstill
●Distance between stations up to 100 m (100BASE-TX)
●Support daisy chain connection ICPDAS -EtherCAT slave CiA402 Standard 4-axis pulse output module (Metal Case) - ECAT-2094P
ICPDAS -EtherCAT slave CiA402 Standard 4-axis pulse output module (Metal Case) - ECAT-2094P● Support CiA402 protocol
● 4-axis independent control and pulse output up to 4MHz
● Pulse output options: CW/ CCW, Pulse/Direction
● 4 x Encoder interfaces (A, B, Z), differential
● Distance between stations up to 100 m (100BASE-TX)
● Support daisy chain connection ICPDAS - EtherCAT Slave I/O Module with Isolated 16-ch DI - ECAT-2053
ICPDAS - EtherCAT Slave I/O Module with Isolated 16-ch DI - ECAT-2053● On the fly processing: EtherCAT
● Powerful MCU handles efficient network traffic
● 2 x RJ-45 bus interface
● Distance between Stations up to 100 m (100BASE-TX)
● Support daisy chain connection
● EtherCAT conformance test tool verified
● Removable terminal block connector
● LED indicators for the I/O status
● Built-In digital I/O: 16 DI
● RoHS compliant
● ESD Protection 4 KV Contact for each channel EtherCAT Slave I/O Module with Isolated 8-ch DO and 8-ch DI
EtherCAT Slave I/O Module with Isolated 8-ch DO and 8-ch DI● On the fly processing: EtherCAT
● Powerful MCU handles efficient network traffic
● 2 x RJ-45 bus interface
● Distance between Stations up to 100 m (100BASE-TX)
● Support daisy chain connection
● EtherCAT conformance test tool verified
● Removable terminal block connector
● LED indicators for the I/O status
● Built-In digital I/O: 8 DI and 8 DO
● RoHS compliant
● ESD Protection 4 KV Contact for each channel EtherCAT Slave I/O Module with Isolated 6-ch DI and 6-ch Relay
EtherCAT Slave I/O Module with Isolated 6-ch DI and 6-ch Relay● On the fly processing: EtherCAT
● Powerful MCU handles efficient network traffic
● 2 x RJ-45 bus interface
● Distance between Stations up to 100 m (100BASE-TX)
● Support daisy chain connection
● EtherCAT conformance test tool verified
● Removable terminal block connector
● LED indicators for the I/O status
● Built-In digital I/O: 6 DI and 6 Relay DO
● RoHS compliant
● ESD Protection 4 KV Contact for each channel EtherCAT Slave I/O Module with Isolated 8-ch DO and 8-ch DI
EtherCAT Slave I/O Module with Isolated 8-ch DO and 8-ch DI● On the fly processing: EtherCAT
● Powerful MCU handles efficient network traffic
● 2 x RJ-45 bus interface
● Distance between Stations up to 100 m (100BASE-TX)
● Support daisy chain connection
● EtherCAT conformance test tool verified
● Removable terminal block connector
● LED indicators for the I/O status
● Built-In digital I/O: 8 DI and 8 DO
● RoHS compliant
● ESD Protection 4 KV Contact for each channel EtherCAT Slave I/O Module with Isolated 8-ch DO and 8-ch DI
EtherCAT Slave I/O Module with Isolated 8-ch DO and 8-ch DI● On the fly processing: EtherCAT
● Powerful MCU handles efficient network traffic
● 2 x RJ-45 bus interface
● Distance between Stations up to 100 m (100BASE-TX)
● Support daisy chain connection
● EtherCAT conformance test tool verified
● Removable terminal block connector
● LED indicators for the I/O status
● Built-In digital I/O: 8 DI and 8 DO
● RoHS compliant
● ESD Protection 4 KV Contact for each channel EtherCAT Slave I/O Module with Isolated 16-ch Digital Inputs
EtherCAT Slave I/O Module with Isolated 16-ch Digital Inputs● On the fly processing: EtherCAT
● Powerful MCU handles efficient network traffic
● 2 x RJ-45 bus interface
● Distance between Stations up to 100 m (100BASE-TX)
● Support daisy chain connection
● EtherCAT conformance test tool verified
● Removable terminal block connector
● LED indicators for the input status
● Built-In 16 digital inputs
● RoHS compliant
● ESD Protection 4 KV Contact for each channel EtherCAT Slave I/O Module with Isolated 16-ch Digital Outputs
EtherCAT Slave I/O Module with Isolated 16-ch Digital Outputs● On the fly processing: EtherCAT
● Powerful MCU handles efficient network traffic
● 2 x RJ-45 bus interface
● Distance between Stations up to 100 m (100BASE-TX)
● Support daisy chain connection
● EtherCAT conformance test tool verified
● Removable terminal block connector
● LED indicators for the output status
● Built-In 16 digital outputs
● RoHS compliant
● ESD Protection 4 KV Contact for each channel