ICPDAS I-8094A-G
High Speed 4-axis Motion Control Module with CPU inside
● Independent 4-axis motion control
● Support for hand wheel and jog functions
● 2/3-axis linear interpolation function
● 2-axis circular interpolation function
● Continuous interpolation function
● Programmable T/S-curve acceleration and deceleration
● A maximum of 4 Mpps pulse output rate for each axis
● Pulse output types: CW/CCW or Pulse/Direction
● 32-bit encoder counter for each axis
● Encoder pulse input types: A/B phase or Up/Down
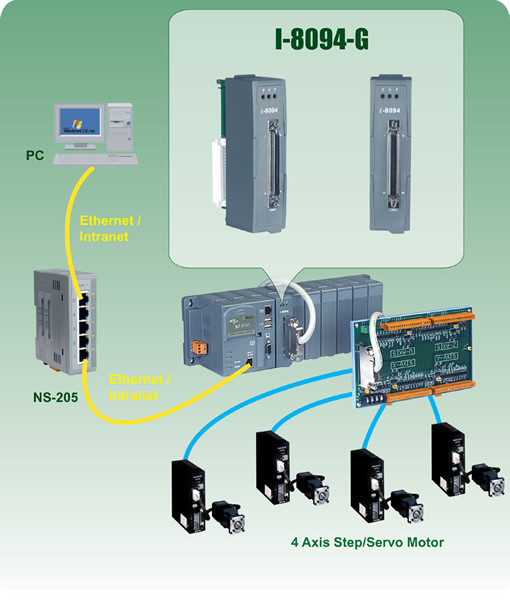
The ICPDAS Motion Module I-8094A-G is a 4-axis stepping/pulse-type servo motor control module that can be used on any of the ICPDAS WinCon series controllers, and is suitable for general-purpose motion applications. It is a module that has full functions of I-8094 and has an 80186 CPU inside this module to do extra functions. This CPU let this module be able to do motion without PAC. When working with PAC, It also allows users to add additional functions by calling user-defined subroutines (macro functions). Therefore, users can build their special know-how inside this module. The ICPDAS Motion Module I-8094A-G contains a high-performance motion ASIC.
Apart from a wide speed range, this intelligent motion controller also has a variety of motion control functions built in, such as 2/3- axis linear interpolation, 2-axis circular interpolation, T/S-curve acceleration/deceleration, various synchronous actions, automatic homing, and others. In addition, most of the I-8094A motion control functions are performed with little load on the processor. While driving the motors, the motion status, and the other I/O status on the WinCon modules, can still be monitored.
As a result of the low CPU loading requirements of the I-8094A, one or more motion modules may be used on a single WinCon controller. ICPDAS has also provided a variety of functions and examples to reduce the need for programming by users, making it a highly cost-effective solution for motion builders.
With different communication interface, the I/O modules can be classified to high communication speed (Parallel bus) 8K series modules and low communication speed (serial interface) 87K series modules.
| There are two types of I/O modules, Parallel and Serial. The parallel modules (I-8 Series) are high-speed modules and support MCU (Main Control Unit) only. | |
| Item | I-87K Series |
| Communication Interface | Parallel Bus |
| Protocol | - |
| Communication Speed | Fast |
| DI with Latched Function | - |
| DI with Counter Input | - |
| Power On Value | - |
| Safe Value | - |
| Programmable Slew-rate for AO Module | - |
High Profile VS Low Profile
With different form factor, I/O modules can be classified to high profile and low profile. Basically, high profile and low profile modules that with same item number also have same I/O channel number.
For example: I-8054 and I-8054W both has 8 DI and 8 DO.
Except I/O channel number, other specifications could be different. You have to double check whether the specifications suit your application.
For example: For I-8054W, its DI logic high level is +10 ~ +50V. But for I-8054, it is +3.5 ~ +30V
APPLICATIONS:
● X-Y Table
● Fix-Pitch Stamping Machine
● Transfer Machine
● Spinner
● Loader/Unloader
| Interpolation Functions | ||
| Linear Interpolation (Interpolation Speed: 4 Mpps) | 32-bit max for any single command | |
| Circular Interpolation (Interpolation Speed: 4 Mpps) | 32-bit max for any single command | |
| Bit Pattern Interpolation (Interpolation Speed: 4 Mpps) | Yes (for i-8000 only) | |
| Continuous Interpolation (Interpolation Speed: 2 Mpps) | Yes | |
| Drive Speed Curve | Maximum Drive Speed | 4 Mpps |
| Constant Speed Driving | Yes | |
| Trapezoidal Acc/Dec Driving | Yes | |
| Asymmetrical Trapezoidal Driving | Yes | |
| Asymmetrical Trapezoidal Automatic Deceleration Driving | Yes | |
| S-curve Acc/Dec Driving | Yes | |
| Asymmetrical S-curve Driving | Yes | |
| Asymmetrical S-curve Automatic Deceleration Driving | No | |
| Position Control | Logic Position Counter/Bit Length for output pulse | 32-bit |
| Real Position Counter/Bit Length for output pulse | 32-bit | |
| Position Compare Register Number/Axis | 2 | |
| Software Limit | Yes | |
| Position Counter Variable Ring | Yes | |
| Automatic Home Search | Configurable (4 Steps) for each axis including irregular operation handling | Yes |
| Step 1: high-speed near home search | ||
| Step 2: low-speed home search | ||
| Step 3: low-speed encoder Z-phase search | ||
| Step 4: high-speed offset drive | ||
| Synchronous Action | 10 activation factors (provocatives or events) and 14 actions | Yes |
| External Signal for Driving | Fixed/Continuous Pulse Output | Yes |
| Manual Pulsar | Yes | |
| Other Functions | Drive Speed Change during Driving | Yes |
| Output Pulse Number Change during Driving | Yes | |
| Triangle Form Prevention of Speed Curve | Yes | |
| Servo Motor Signal | Servo Ready and Alarm Input Signals/Axis | Yes |
| Servo Enable Output/Axis | Yes | |
| Other Input Signals | IN0 (Near Home), IN1 (Home), IN2 (Z-phase), IN3/Axis | Yes |
| Emergency Signal | Yes | |
| Input Signal Integral Type Filter | Filter Time Constant: 2 ~ 16 ms, 8 stages | Yes |
| Macro Functions | User defined subroutines | Yes |
| The contents of subroutines can be different according to users' special designs | ||
| Can load functions as a macro on-line | ||
| Can run macro by default function calls | ||
| Keep user's know-how in privacy |
| Operating Temperature | -20 °C ~ +75 °C |
| Storage Temperature | -30 °C ~ +85 °C |
| Operating Humidity | 10 ~ 85% RH, non-condensing |
| Storage Humidity | 5 ~ 90% RH, non-condensing |